
Description
ROBOTIS Manipulator-H Robotic Manipulator
The Manipulator-H Robotic Manipulator is a Multi-purpose and affordable robotic arm designed for research and automation projects. Designed for applications as R&D projects, to be mounted in a mobile manipulator or as a part of a robot torso or a humanoid. The arm is available in two main configurations, the manipulator-L and the manipulator-H. The “L” configuration has a repeatability of ±0.1 mm, a weight of 4.5kg, 1kg of payload and a 180W power. While the “H” configuration has a repeatability of ±0.5 mm, a slightly higher weight (5.5 kg), a payload of 3 kg and a power of 640W. The main characteristics of the ROBOTIS Manipulator are its lightweight for an easy placement and transferring, a modular design for an easy maintenance and its competitive price. Both configurations have 6 DOF and an optional gripper with one degree-of-freedom.
Features
- Multi-purpose, low-cost manipulator.
- 6 DOF (built with Dynamixel Pro).
- Modular structure for easy maintenance.
- Lightweight design for easy placement and mobility.
- Endures payload suitable for small to mid scale operations.
- Wide operation range.
- Suitable for repetitive and high precision operation.
- USB interface, RS-485 communication.
- Provides SDK for user programming.
- (provides examples of forward / inverse kinematics, profile control).
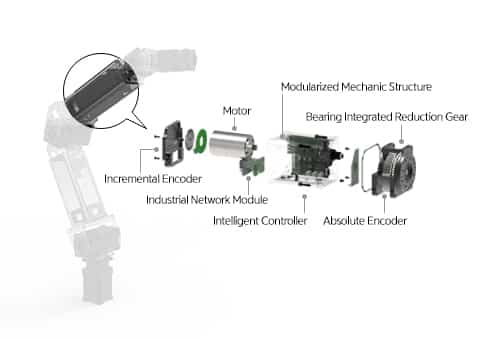
All-in-one module
DC Motor Controller Driver Sensor Cycloid Reduction Gear
Small, Lightweight
- Minimized module size with the self-developed small, lightweight, cycloid reduction gear
- High weight to output rate (0.05Nm/g)
- High shock resistance
Precise control and low backlash
- Incremental encoder and contactless magnetic encoder for absolute positioning
- Low backlash of 3~4arcmin
- Performance data provided, tested by KOLAS (Korea Laboratory Accreditation Scheme)
Torque control using current sensor
- High current sensing algorithm and current feedback control
- Position, speed, and current control using an algorithm
Easy development environment
- Provides C-based library
- Provides various solution examples (C , LabVIEW, C#, eclipse, JAVA, etc.)
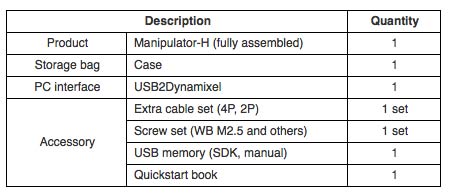
Package Contents
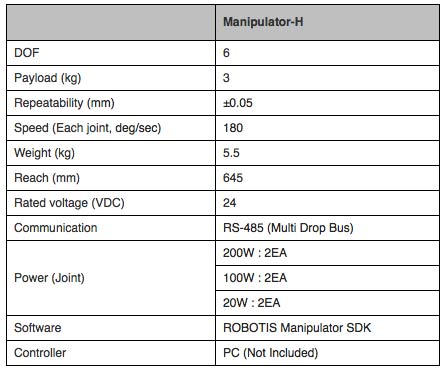
H/W Specifications

S/W Specifications
- Arm access communication protocol library and examples
- Arm control parameter setting and monitoring example
- Kinematics library (FK, IK) and examples
- Joint / end point profile control library and examples
Actuator Configuration
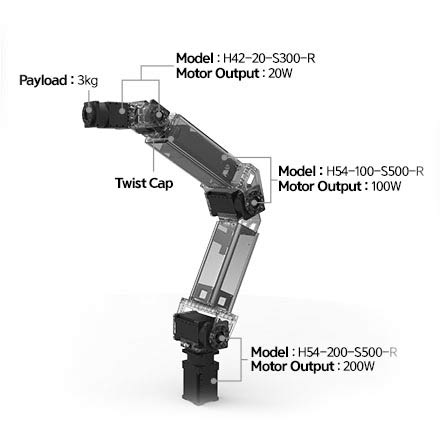
Actuator (DYNAMIXEL PRO) Description
Key Purpose
1. Research and Education
- Experiment with kinematics and dynamics
- Design and research two-armed robot system
- Mobile robot system
2. Industrial Field Operation
- Test and examination equipment
- Small transport system
NOTE: Requires 6 weeks of lead time upon order. This product has NOT yet been released(Pre order only).


Reviews
There are no reviews yet.